Inoue S and Ishida Y
In this paper, we propose a model-following controller for multiple-input multiple-output (MIMO) systems. This control system avoided the use of plant parameters by using the active disturbance rejection control method. Moreover, we propose a design method for the system, which could easily be decoupled for MIMO systems. Furthermore, the model-following controller could be designed for use when the orders of the model and the plant are different. Simulation and experimental results showed that the proposed method was robust to plant parameter variations and external disturbances.
PDFShare this article
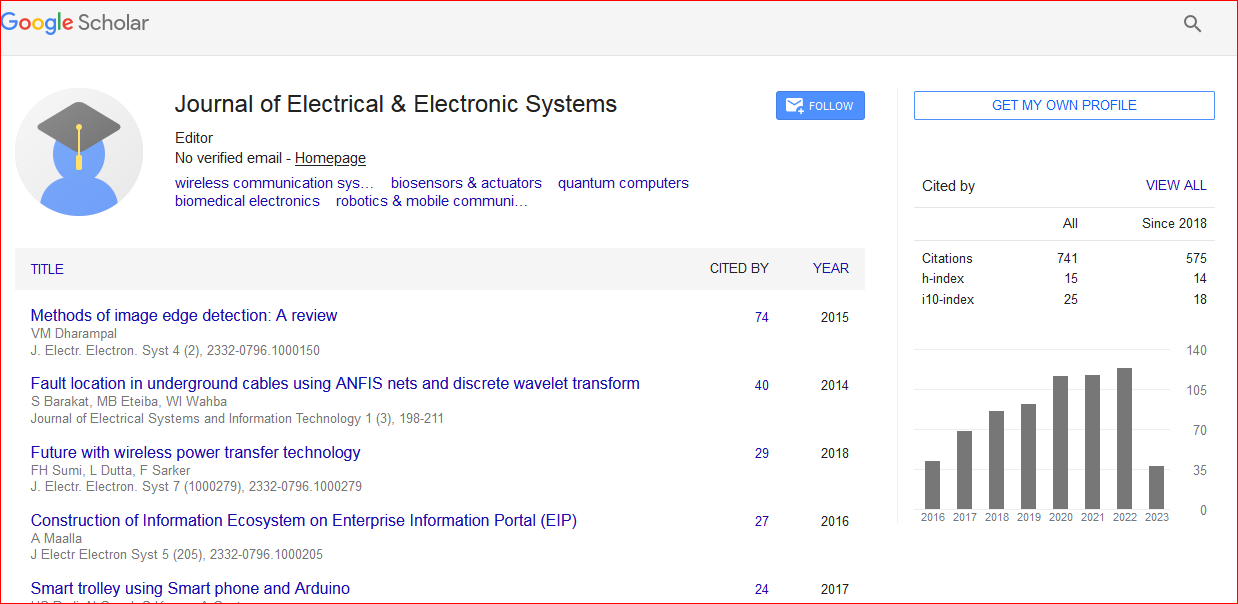
Journal of Electrical & Electronic Systems received 733 citations as per Google Scholar report