














 22 / 45
22 / 45

Page 107
conferenceseries
.com
Volume 6, Issue 4 (Suppl)
Agrotechnology, an open access journal
ISSN: 2168-9881
Agri 2017
October 02-04, 2017
allied
academies
10
th
International Conference on
AGRICULTURE & HORTICULTURE
October 02-04, 2017 London, UK
Assessing the navigational accuracy of an autonomous orchard robot equipped with 2D laser scanner
and particle filter
Pieter M Blok
1
, Koen van Boheemen
2
and
Gookhwan Kim
3
1
Wageningen University and Research, The Netherlands
2
Wageningen University and Research, The Netherlands
3
Rural Development Administration, Republic of Korea
Statement of the Problem
: A challenge faced when growing fruit in orchards is efficient weed control. Weed control is often
done with tractors and mowing devices. The labour intensive nature of this operation causes that the frequency of mowing is
limited to a minimum. An autonomous platform that can carry out this operation without human intervention would allow
farmers to regularly tackle weeds in their orchards without the large labour requirement. In the design of an autonomous
orchard robot, a combination of sensors and navigation algorithms need to be chosen which provides similar or higher
navigational accuracies compared to current mowing with manual steering. The objective of this study is to investigate the
accuracy of a sensor and algorithm combination for autonomous in-row navigation of an orchard robot.
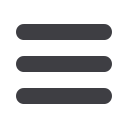
Methodology & Theoretical Orientation
: A Clearpath Robotics Husky A200 robot was equipped with a 2D laser scanner,
a three-axis IMU, wheel odometry and an RTK-GNSS sensor. A navigational algorithm was built based on the particle filter.
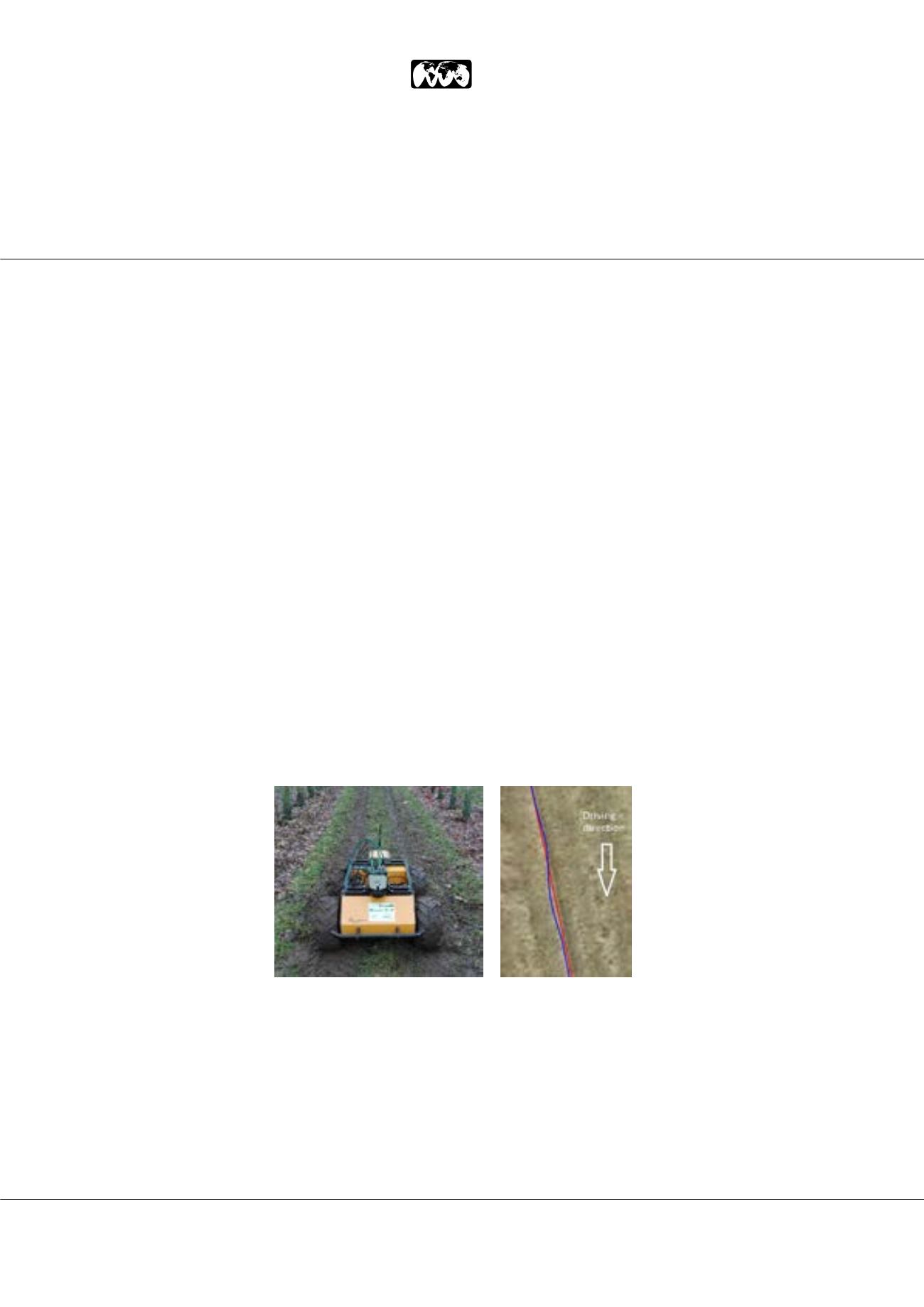
Experiments were done in a Dutch apple orchard to assess the navigational accuracy, by tracking the robots trajectory between
two tree rows with RTK-GNSS and to calculate the lateral and angular deviation from the optimal AB-line.
Results
: The particle filter guided the robot through the orchard path with an average lateral deviation of 0.07m and an average
angular deviation of 2.57° from the AB-line at a speed of 0.25 m/s and respectively 0.08m and 1.73° at 0.5 m/s.
Conclusion & Significance
: The selected sensor layout and navigational algorithm proved to be suitable for autonomous in-
row navigation in fruit orchards as an alternative for manual driving. Headland detection and obstacle avoidance were not
taken into account in this study, and are part of the further development of the autonomous orchard navigation.
Biography
Pieter M Blok is a scientific researcher at Wageningen University and Research. He is specialized in agricultural robotics, computer vision, mechatronics and sensor
technology, with 6 years’ work experience in various national and international research projects. He is author of several peer-reviewed conference papers. Pieter
graduated in 2011 as a Master of Science (MSc) in Agricultural Engineering at Wageningen University and is currently conducting his PhD entitled “Agro-robotics
in open field food production”.
pieter.blok@wur.nlPieter M Blok et al., Agrotechnology 2017, 6:4(Suppl)
DOI: 10.4172/2168-9881-C1-028